"Yapay Zeka Yolculuğu: Adım 2"
Yazımızın 2. Adımından devam ediyoruz.
En son ajanlardan bahsetmiştik şimdi ise sıra çevre tiplerinde,
Çevre Tipleri : Gözlemlenebilirlik açısından yapay zeka çevreleri genellikle tamamen veya kısmen gözlemlenebilirdir. Gözlemlenebilirlik düzeyi, bir ajanın yani yapay zeka sisteminin çevresindeki durumu algılama yeteneğini ifade eder. Kendi içinde 7 maddeye ayrılmıştır.
- Tamamen veya kısmen gözlemlenebilirlik (Fully observable vs. partially observable)
Ajanın sensörleri, etrafındaki tüm alanları kapsıyor ve zamanın her bir noktasında ortamın tam durumuna erişmesini sağlıyor. Yani ajan çevresinde ki tüm bilgileri doğrudan gözleyebilir ve bu duruma dayanarak kararlar alabilir.
- Statik, yarı dinamik veya dinamik (Static, semidynamic or dynamic)
Ortam değişmediğinde statiktir. Zaman geçtikçe ortamın kendisi değişmezse ancak ajanın performans puanı değişir ise, ortam yarı dinamiktir. Bir ajan düşünürken ortam değişebilirse ortamın ajan için dinamik olduğunu söyleriz.
- Deterministik veya Stokastik
Bir sonraki durumun mevcut durum ve ajan tarafından tamamen belirlendiği çevreye Deterministik çevre denir Ajanın hareketleri sonucunda ortaya çıkan durumlar belirlenmiştir ve önceden bilinir Ajan da her hareketin aynı olduğu için aynı sonuçlar alınır. Satranç oyunu deterministik çevreye güzel bir örnektir
Stokastik çevre ise Ajanın hareketleri sonucunda ortaya çıkan durumlar rastgele olabilir. Aynı hareketlerin yapılması durumunda farklı sonuçlar elde edilebilir. Buna en iyi örnek zar oyunlarıdır.
- Tek veya Çoklu Ajanlı Ortam
Tek bir ortamda tek başına çalışan bir ajan tek ajanlı ortam olduğunu gösterir. Birden fazla ajan aynı anda hareket ettiğinde multiagent yani çok ajanlı ortam(Rekabetçi veya Kooperatif) oluşur.
Tek ajan: Ajan çevreyi gözlemler bunun sonucunda çevreye aksiyon uygular. Çevre, ajanın aksiyonlarına tepki verir ve ajan çevresinden gelen ödül veya cezaları kullanır.
Çoklu ajan: Her ajan çevreye gözlem yapabilir, aksiyonlar uygulayabilir ve diğer ajanları gözlemleyebilir. Bu durum ajanlar arasında işbirliği veya rekabet doğurur.
- Kooperatif: Ajanlar birlikte hareket edebiliyor ve bu durumda ödülü en iyiye çekebiliyor ise kooperatif yani işbirlikçidir.
- Rekabetçi: Ajanlar diğer ajanlar ile rekabet halinde ve ödülü en iyileme durumunda ise rekabetçidir.
- Ayrık veya Sürekli (Discrete vs. Continuous)
Ayrık çevre durum ve aksiyon uzaylarının sürekli ve genellikle sonsuz olduğu durumdur
Sürekli çevre ise durum ve aksiyon uzaylarının sürekli ve genellikle sonsuz olduğu bir durumu ifade eder.
- Epizodik Çevre
Ajan atomik bölümlere ayrılır. Her bir bölüm ajanın algılayıp ardından tek bir eylem gerçekleştirmesinden oluşur. Ve her bölümde ki eylem seçimi yalnızca bölümün kendisine bağlıdır. Video oyunlarında ki her seviye epizodik çevreye örnek olarak gösterilebilir. Her bölüm bağımsızdır ve birbirinden etkilenmezler.
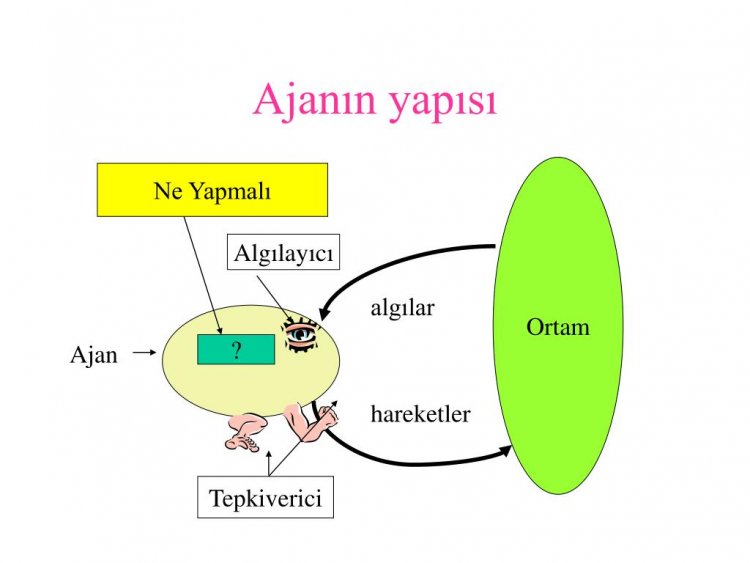
- Ajan ve çevre ilişkisi
Ajanlar çevreleriyle etkileşimde bulunarak belirli bir görevi yerine getirmek isterler, bunun içinde çevresinde ki durumu gözler ve bu gözlemleri temel alarak belirli aksiyon seçerler. Seçilen aksiyonlar çevrede uygulanır ve çevre bu aksiyonlara tepki verir. Çevreden gelen geri dönüşler ise ajanın davranışlarının düzenlenmesine ve öğrenilmesini sağlar.
En kısa şekilde anlatmak istersek Ajan çevreden aldığı bilgileri işleyerek çevreye bir harekette bulunur ve çevre ajan ilişkisi kurulur.
PROBLEM ÇÖZME STRATEJİLERİ
1-Arama Yaparak Problem Çözme
Problem çözme ajanları belirli bir görevi yerine getirmek veya hedefe ulaşmak için tasarlanan sistemdir. Mevcut durum ve ajanın performans ölçüsü, problem çözmenin ilk adımıdır. Hedef bir dizi durum olarak alınır. Ajanın görevi ise hangi hareket sırasının onu hedef duruma getireceğini bulmaktır.
2-Arama Ağaçları
Arama ağaçları başlangıç durum alanını birlikte tanımlayan ardıl işlev tarafından oluşturulur. Bu algoritmalar, bir başlangıç düğümünden başlayarak ağacı genişletir veya derinleştirir. Durumla kontrol eder ve hedef durumu veya çözümü bulmaya çalışır. Yani kök başlangıç durumunu , Saçak ise oluşturulan ancak henüz genişletilmeyen düğümlerin toplanmasıdır.
Yaygın olarak kullanılan bazı ağaç arama algoritmaları:
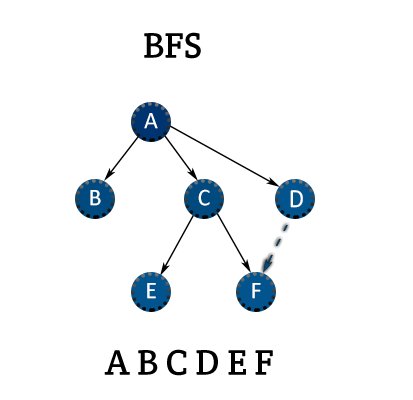
- Genişlik Öncelikli Arama (Breadth-First Search (BFS)):
Kök düğüm önce genişler, daha sonra kök düğümün tüm ardılları genişler.
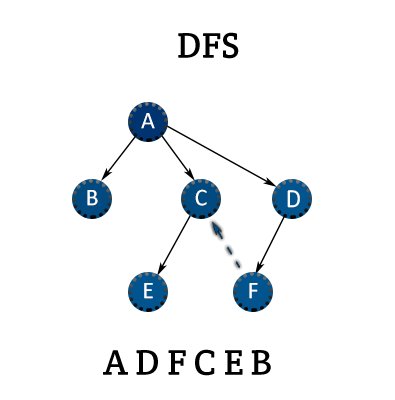
- Derinlik Öncelikli Arama (Depth-First Search - DFS):
Bir dalı tamamen keşfeder ve ardından diğer dallara geçer.
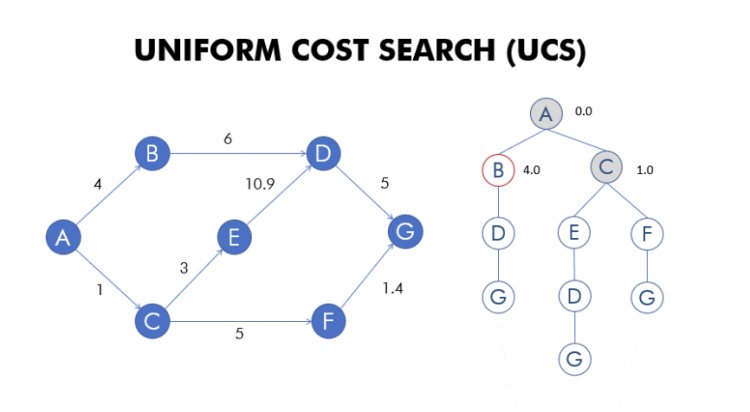
- Uniform Cost Search (UCS):
Arama ağaçlarında düğümleri genişletirken maliyeti en düşük olan düğümleri seçmeye odaklanan bir arama algoritmasıdır. Bu arama algoritması BFS ve DFS gibi diğer arama algoritmalarının genelleştirilmiş bir formudur.
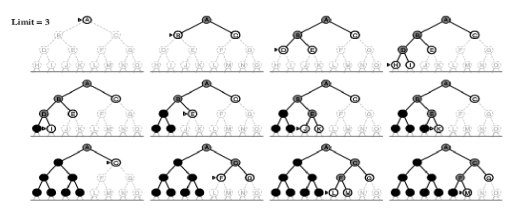
- Iterative Deepening Depth-First Search (IDS):
En iyi derinlik sınırını bulan DFS ile kullanılır. Bunu bir hedef bulunana kadar kademeli olarak artırarak yapar. Avantajları arasında maliyeti kontrol edilebilir olması ve bir çözüm bulunduğunda en kısa çözümü garantileme potansiyelinin olmasıdır. Ancak durum uzayı büyüdükçe ve tekrarlanan işlemler sebebiyle zaman alabilir.
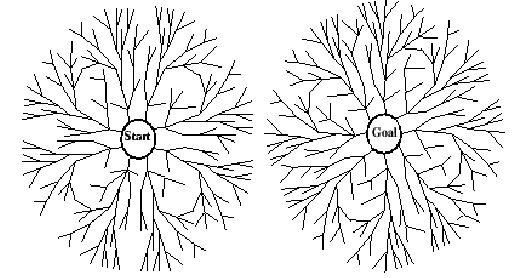
- Bidirectional Search
Bu iki yönlü aramadaki fikir, biri düğümden ileri ve diğeri hedeften geriye doğru iki eş zamanlı arama yaparak iki aramanın ortada buluşmasını umarak arama süresini yarıya indirme hedeflenmiştir.
Umarım beğenmişsinizdir. Yazı serisi devam edecektir. Buraya kadar vakit ayırdığınız için teşekkürler:)












